要製造飛天汽車(flying car),是否只給汽車加裝機翼便可成事?麻省理工學院(MIT)認為絕非如此簡單,於是開發出可兼顧空陸兩棲的路徑規劃演算法,可讓飛天汽車系統因應移動速度和耗電量,行駛路徑為空路或陸路;如沿途遇上障礙物,更懂得自動迴避。
平衡速度和耗電量
走陸路省電卻緩慢,飛空路迅速卻耗電。MIT 電腦科學及人工智慧實驗室(CSAIL)博士生 Brandon Araki 的演算法正可助無人機在移動速度和耗電量之間取得平衡,為陸空兩棲無人載具判定最佳的移動航線:
無人機裝配車輪後可變得更加靈活,只是續航時間略為縮短。
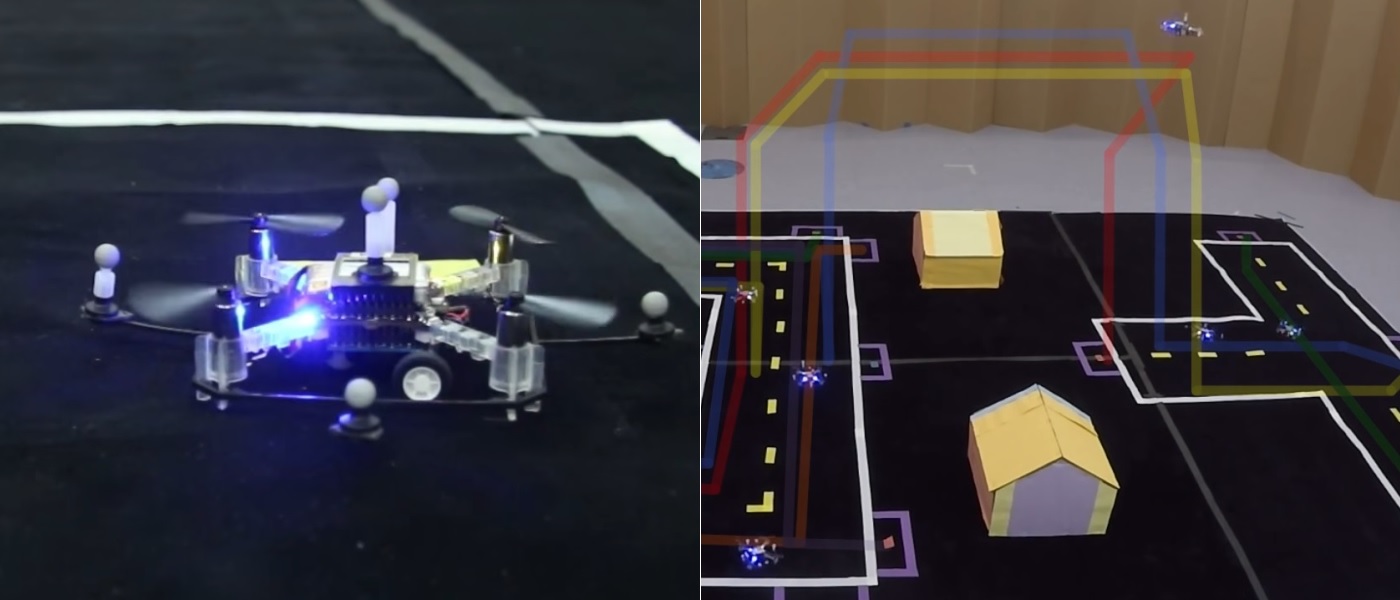
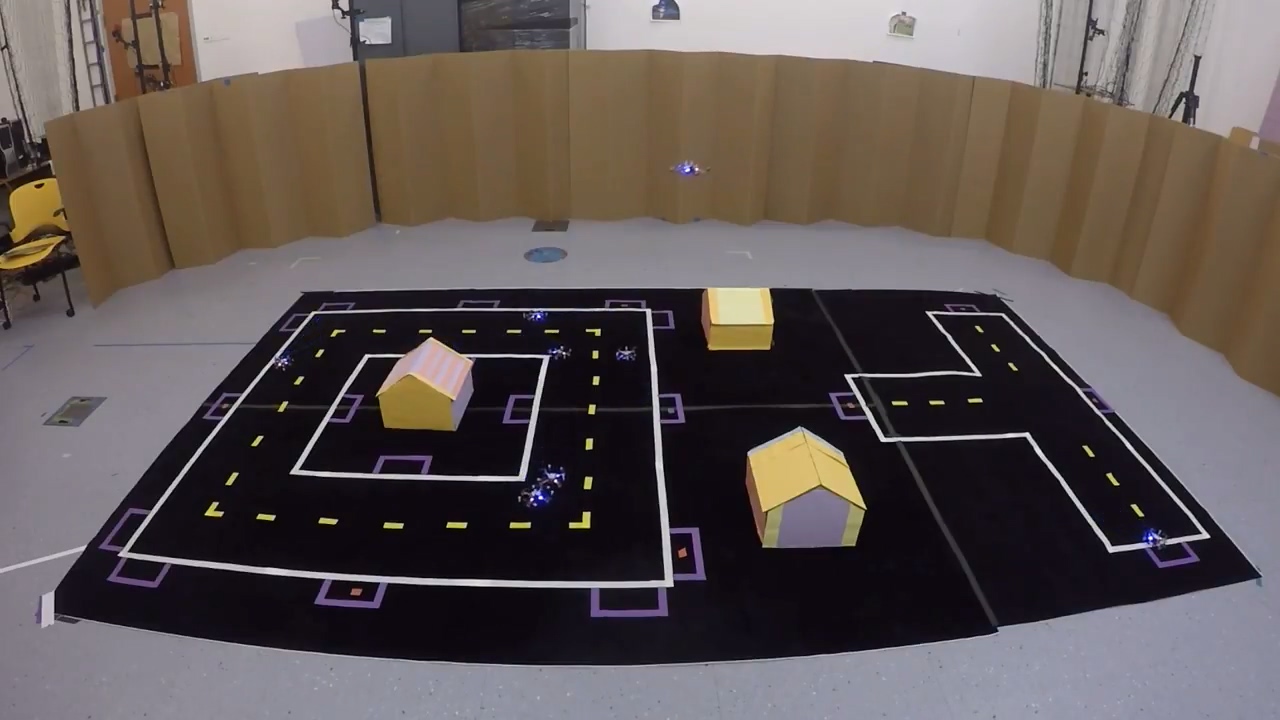
研究員在四旋翼無人機底部加裝 1 對發動機和車輪,並預載上述的路徑規劃演算法,進行模擬測試。結果 8 台空陸無人機成功在小型城市模型中順利完成旅程;每當沿途遇上屋子模型,無人機便會自動飛高迴避。飛行器加裝車輪後,飛行時間便會減少 14%:電量只可支持連續飛行 90 米,或者陸上行駛 252 米。然而,因陸路比空路有效率,所以整體增益可彌補損失。
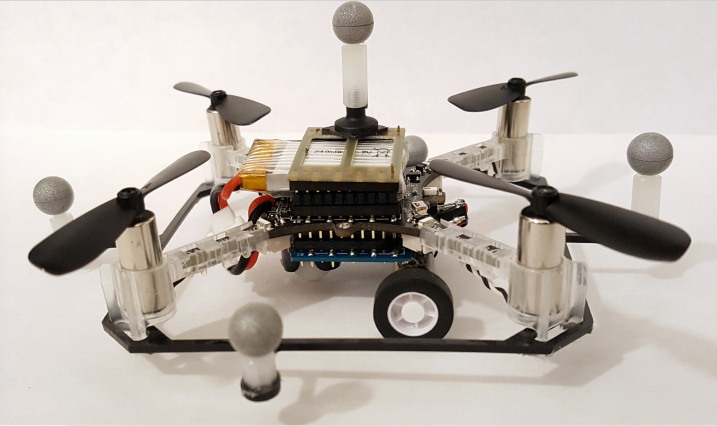
測試用的陸空無人機其實是裝配了一對滾輪的四旋翼機。

Brandon Araki 的路徑規劃演算法會平衡速度和耗電量,適合可陸空移動的機體。
對飛天汽車的啟發
這個兼顧陸空路徑規劃的演算法的研究項目,對日後飛天汽車的研發或會帶來重大啟發。CSAIL 總監 Daniela Rus 指出,要製造出安全而具效能的飛天汽車,並非只替車輛添上機翼如此簡單,而是要把駕駛經驗引入至自駕系統中。他們所開發的演算法,正可為飛天汽車的操作加入人工智慧判斷:無人駕駛的飛天汽車可經由空中航道飛抵工地或災場,降落後可循陸路進入狹小現場,運送物件或搜救傷者。
【技術前身】Picobug 無人機既飛天又爬地,是深入險境勘察的小幫手
【遙控玩具】遙控車+飛行器混合體 陸空兩棲無人機 Syma X9 性能評測
【偵察工具】Rooster 無人機與機械車合體 隨時飛天遁地執行偵測任務
【陸空交通】AeroMobil 陸空兩棲飛天汽車具折疊式機翼 獲300萬歐元融資生產
他日技術得以擴大規模,便能應付現實世界的地盤和災區,而非小小的模擬城市。
▼ 小型四軸機裝備一對車輛,得以陸空兩用,模擬在城市內運作
資料及圖片來源:MIT、影片截圖




