
現在無人機之所以容易操作,全因內藏大量測量儀器,輔助航拍玩家修正航道。劍橋大學的電算視像及機械組成功研發出 SegNet 和 Visual Localisation 技術,能夠即時辨認道路上的物件和所在地點,號稱準確度高於現有的雷達和 GPS 定位系統,為無人機和無人駕駛汽車提供更理想的自動導航方案。
可代替 GPS 與雷達
兩種技術均為無人車輛而設,透過分析影像和複雜計算,協助乘客沿途定位和辨別路面障礙,得以取代 GPS 系統和雷達、光達等感應器,免除價格高昂、體積較大、易受干擾等缺點。同樣技術亦可應用於其他自動機械,或是內置於相機,用作導航和提供現場資訊。
- Visual Localisation:精於辨認影像內的地點和方向,曾於劍橋中心的國王街的 1 公里路段測試,位置和方向誤差分別低至 2 米和 3 度;
- SegNet:擅長即時辨別道路上的物件,包括:建築物、行人、馬路、行人路、樹木等 12 種,以每點像素計,準確度超過 90%。SegNet 曾經走出實驗室,在城市道路和高速公路實地測試,具潛力應用於警告系統和防撞技術,惟未足以完全取代人手操作車輛。
-

- SegNet 辨識地面不同物件準確度頗高。

-
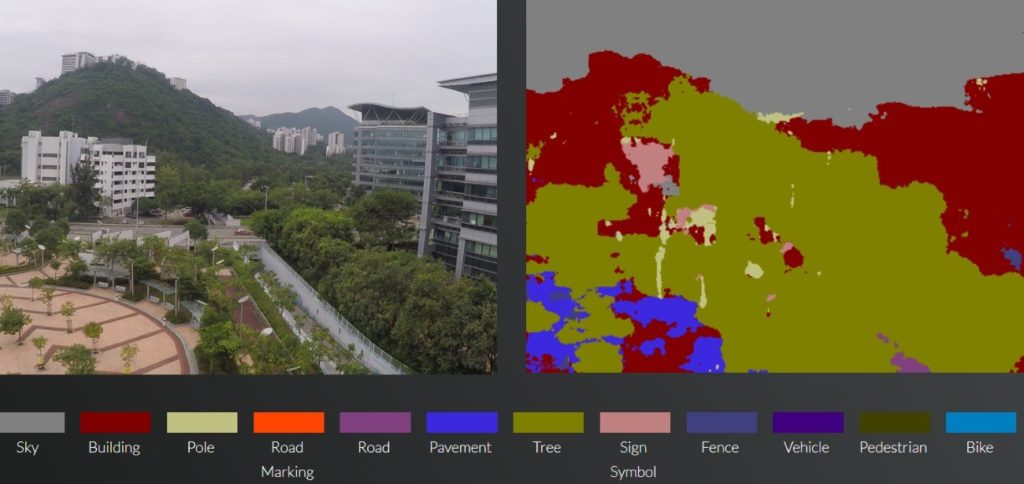
- 飛上空中顯然能力不及……

SegNet 懂得自學和進步
以上技術均採用「深度卷積編碼及解碼結構」(deep convolutional encoder-decoder architecture),是一種分層分類的電算分析方法,常用於圖像辨識。這些電腦之所以懂得分析影像內容,全因受過長時期「訓練」。以辨別物件的 SegNet 為例,團隊先要人手標籤 5,000 幅照片上每一顆像素的內容,再把這些標記好的照片輸入,讓 SegNet 熟識每個項目的特徵,據悉學習過程需時 2 日。
目前 SegNet 已能辨識道路和市區建築物,惟暫未能處理郊外、荒野、雪地等地理環境。團隊把 SegNet 和 Visual Localisation 在網上公開,除了是向公眾示範有關技術外,也是為了收集「學習材料」,讓機械可接受更多「訓練」。以上基於深度卷積編碼及解碼結構的圖像分析技術及應用詳情,請參閱有關論文。
▼ 劍橋大學講解教導機械看見物件的方法




