
任何一台航拍機都會有一個飛行控制系統(Flight Controller,簡稱「飛控」)。飛控有如一台小型電腦,主要用於處理航拍玩家的操控指示,然後平穩地作出相對的反應。當然,現時的飛控已包含 GPS 模組、陀螺儀、加速度計和氣壓計等感應器,讓系統可綜合各方面的數據而作出反應。
飛控設計愈趨易用
一部航拍機孰優孰劣,便要看飛控的反應及穩定性。不過,現時的飛控已設計得愈來愈 user-friendly,相對設定也變得簡單,操作門檻比以前低得多了。DJI NAZA 飛控是近年來 DIY 無人機最常用的飛控之一。主要原因是:一來價錢吸引;二來功能亦十分齊全,例如擁有姿態穩定功能及氣壓定高功能,任何情況下保持航拍機自動回歸水平姿態及高度。以下例子使用DJI NAZA-M v2 作示範。

DJI NAZA-M v2 飛控套裝內除飛控外,還包含 GPS 模組。
飛控設定連環 9 步
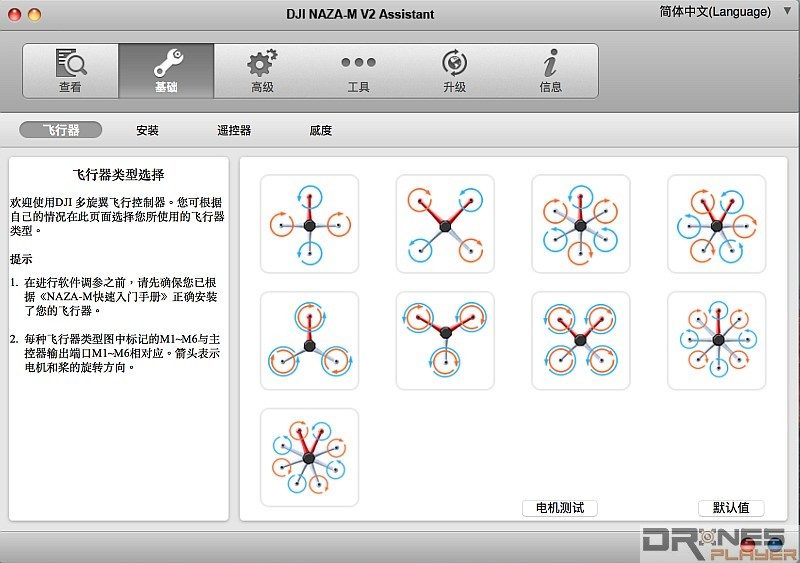
1. 航拍玩家首先要決定飛行器的類型,NAZA-M V2 可支援 4 至 8 軸的飛行平台。
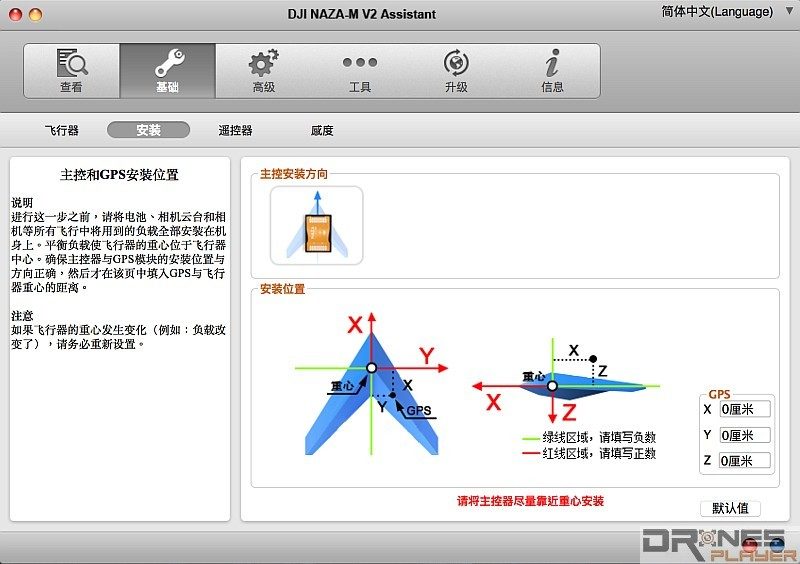
2. 一般情況下,因為飛控內含有陀螺儀、加速度計和氣壓計等感應器,所以必需要替機架裝上電調、電機、電池、雲台、航拍攝影機後,始可找出重心中間點來安裝飛控,而位置一定必需要對準前方。當然有一些品牌及型號是容許輸入偏離重心多少距離。至於 GPS 模組,航拍玩家可按機型而決定安裝在那個位置,只需要在軟件的 GPS 安裝位置設定欄中,輸入偏離重心中間點的距離數值便可。
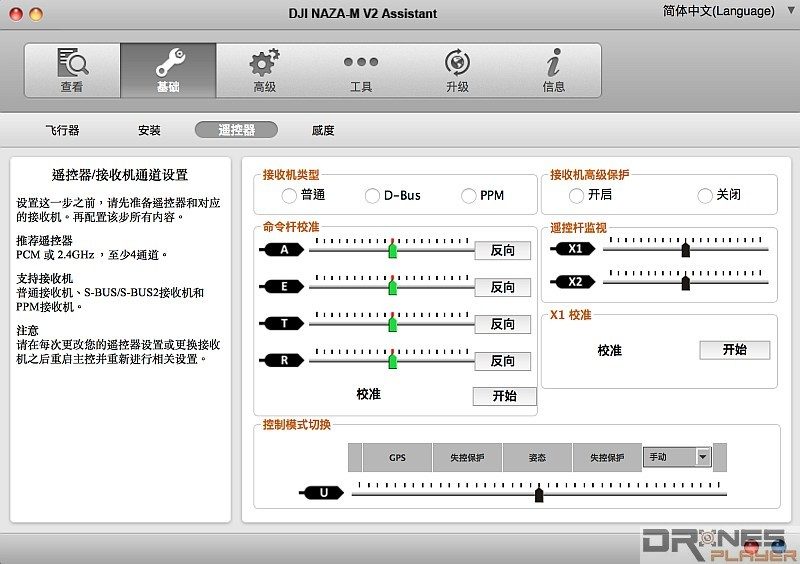
3. 遙控器則按接收機類型去設定,大部分都會使用 D-Bus 比較方便插線。控制校式切換方面,需要小心設定:i) GPS:依賴衛星定位來鎖定飛行器的位置;ii) 姿勢:放棄 GPS 而單使用陀螺儀、加速度計和氣壓計等感應器來鎖定飛行器的位置;iii) 手動:全手動去控制飛行器的高低及位置。

4. 馬達設定方面,馬達怠速速度可按機身重量去調整;如果需要極快反應及機身比較輕便,可把馬達怠速速度調至較高。
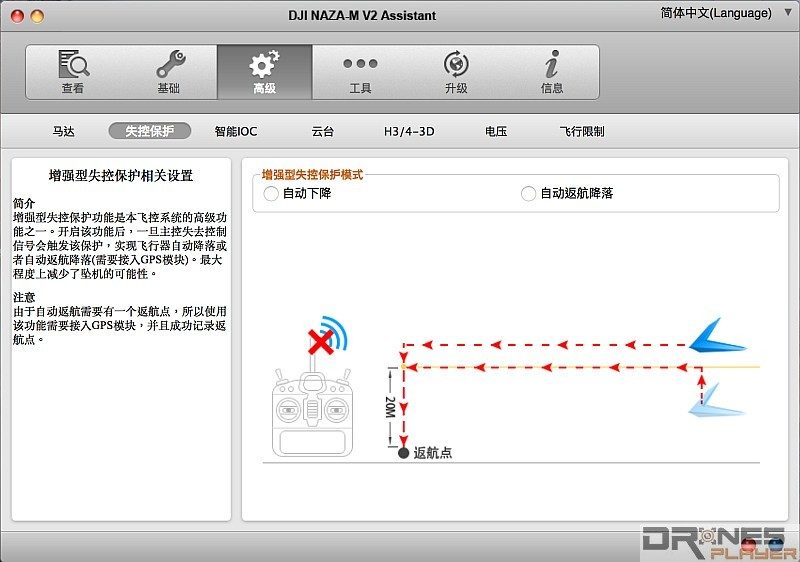
5. 「失控保護」模式是指當航拍機跟遙控器失去聯系時的處理手法。大多會選擇「自動返航降落」,即是失聯時,飛行器會自動飛返起飛點。
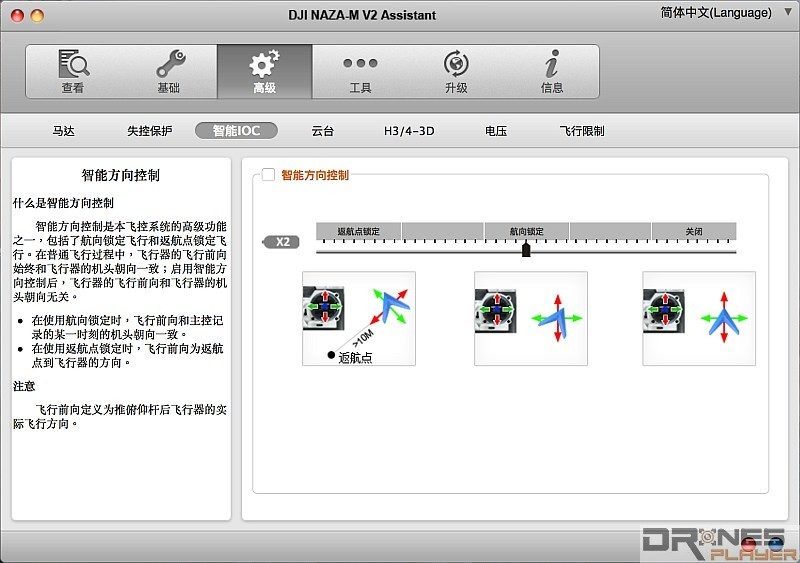
6. 「智能 IOC」,即智能方向鎖定功能,這是需要配合 GPS 功能一齊使用。當航拍機接收到 GPS 超過 6 個衛星的訊號時,便會產生 HOME Point。IOC 則是配合 HOME 使用,當中「返航點鎖定」 意思是 HOME LOCK,把機尾改為指向 HOME 方向,只需要把方向拉向後,就會往 HOME 方向後退。「航向鎖定」意指 COURSE LOCK,無論機頭指向住何方向,前後左右都是跟起跳時的方向決定。
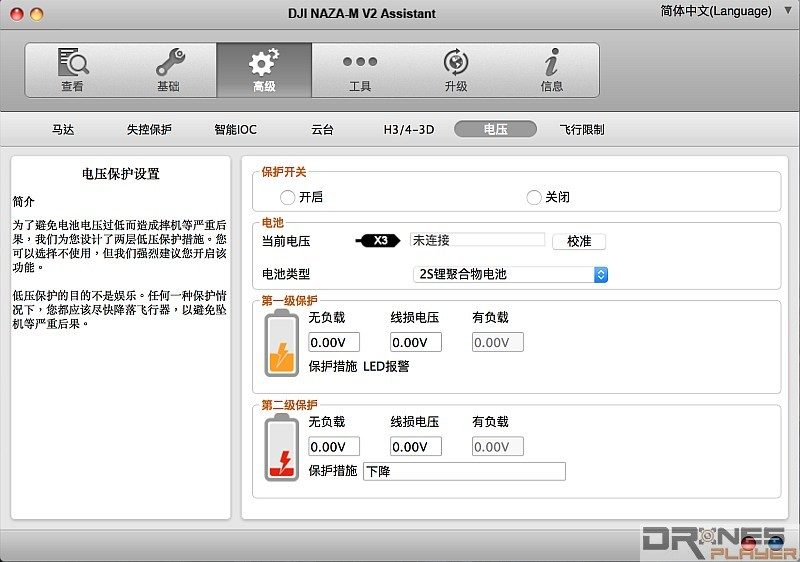
7. 「電壓保護設置」用於當電壓低時如何保護電池。一般來說,第一級保護會設定為大約 30% 電壓,第二級為 20%。保護方法可選擇下降或回航。
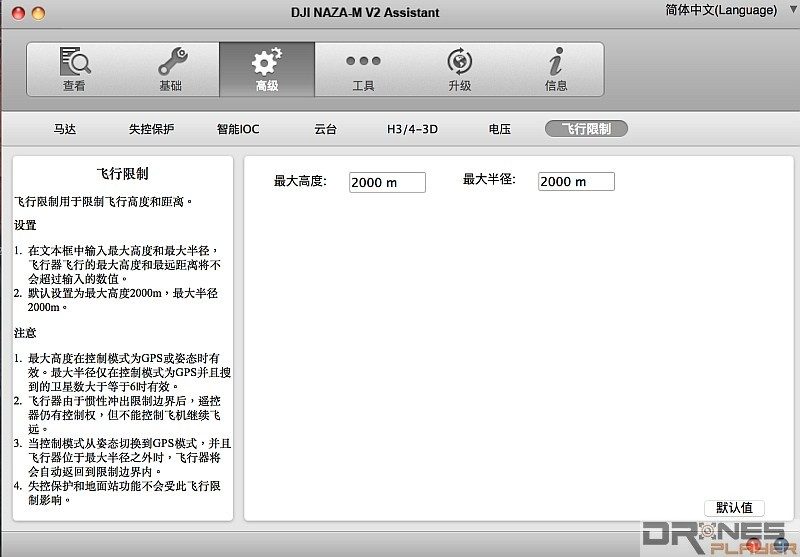
8. 「飛行限制」的最大高度及半徑數值,是會以當時無人機的 GPS 位置來計算的。一般設定需配合當時的現場環境。
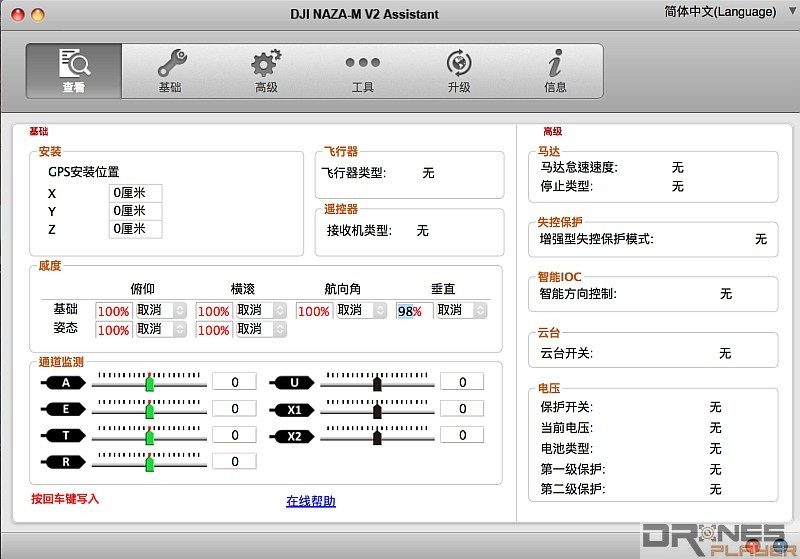
9. 最後,可測試一下航拍機的穩定性及移動反應,再按個人喜好去設定「基礎」 及「姿態」 數值,數值愈大愈進取,但亦可能會令飛行器不斷自轉或只以單方向前進,這時候便需要把數值調低,再入嘗試了。




